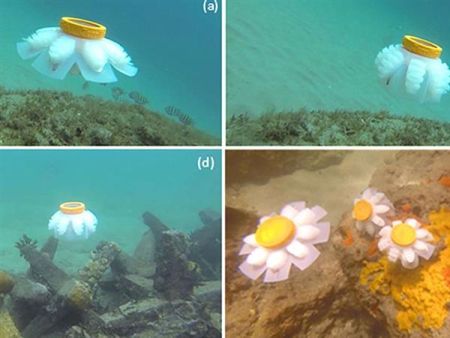
A Florida Atlantic Egyetem ás az amerikai haditengerészet kutatási irodája veszélyeztetett korallzátonyokat figyelő medúzarobotokat printelt. A holdmedúzáról mintázott botok (jellybot) testüknél keskenyebb területeken is úgy tudnak úszni, hogy semmivel nem útköznek össze, és nem is veszélyeztetnek semmit.
A tengeri világ kutatóinak mindig komoly kihívást jelentett törékeny környezetek, például korallzátonyok tanulmányozása. A pár év alatt népszerűvé és fontos trenddé vált a halakról és más tengeri állatokról mintázott puha robotika (soft robotics) sokat segíthet nekik.

A medúzák különösen, mert remekül úsznak.
Előremozgásuk hatékonysága testük alakjuknak tudható be. Mozgásuk örvény-, evező-, lökhajtásszerű, szívó-/tapadókorongféle helyváltoztatás kombinációjából áll.
A szilikonból készült nyolc hidraulikus karral felszerelt robotot két centrifugaszivattyú irányítja. Ezek az eszközök centrifugális erővel gyorsítják fel a folyadék kifelé áramlását.
A robot körüli vizet a szilikongumi felfújására használják, amellyel a karokból úszócsapászerű mozgást váltanak ki. A szivattyúkat deaktiválják ilyenkor, és a karok természetes rugalmassága biztosítja a víz kiáramlását. A többi testrész enyhén felemelkedik, és létrejön a későbbi úszómozgás.
A különféle meghajtó-mechanizmusokat használó más konfigurációkkal ellentétben, az egyetemét úgy tervezték, hogy ne legyen szükség szelepekre, nagyobb térre, egyszerűbb legyen a kontroll, csökkenjenek a kiadások.
A kutatók öt medúzarobotot printeltek, aktuátoraikhoz szilikongumit használtak. Az aktuátorok nem egységesen kemények, paramétereik azért térnek el, hogy a meghajtás hatékonyságát teszteljék velük. Letesztelték azt is, hogy a gépek mennyire tudják összehúzni magukat keskeny résekben. Kiderült: átmérőjüknél szűkebb terekben is elboldogulnak.
Hamarosan környezeti szenzorokat integrálnak beléjük. Irányítóalgoritmusuk hang- és navigációs érzékelőket kap, amelyekkel még jobban tud majd úszni, észreveszi a lyukakat, és eldönti, képes-e áthaladni rajtuk.