Az MIT Lincoln Laboratóriumában az ujjmozgás tanulmányozásával, nem elektronikus hőmérséklet- és érintés-visszacsatolásokkal és motorok beágyazásával igyekeznek javítani a kéznyomtatás technológiáján. A nonprofit e-NABLE közösség és mások nyomatain dolgoznak.
A 2011-ben a férj és feleség Ivan és Jen Owen által alapított e-NABLE a 3DP fontos szereplőjévé vált, önkéntesei sikeresen nyomtatnak világszerte olcsó és működő műkarokat rászoruló gyerekeknek. Az egész projekt néhány terv köré összpontosul, a printelés és az összeszerelés kb. 50 dollár. Egyesek speciális megrendelőkre és kérésekre alakítják át a terveket. A cél a minőség javítása, a robotkéz olcsó és tömeges gyártása.
Ebben próbál segíteni az MIT.

Nyomtatott kezet viszonylag könnyű elkészíteni, jól működő kéz megtervezése azonban sokkal bonyolultabb. Ezért akar az MIT a népszerű és ingyen letölthető tervek minőségén javítani.
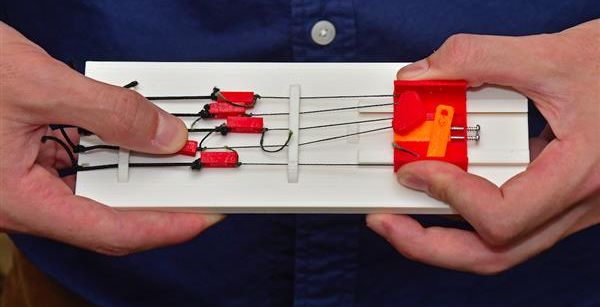
Letöltöttek, kinyomtattak és összeszereltek pár modellt. A használati utasítást követve, szinte az összes PLA-ből készült. Az összeszerelésnél az ujjakat a csukló hátsó részére rakott, a műanyagba fúrt lyukakon keresztüli szálakkal összekötött feszítőblokkhoz kapcsolták. A blokk által rögzített szálakat a felhasználó csuklójának meghajlításával nyújtja ki. A húzóerőt generáló mozgás teszi lehetővé, hogy az ujjak „megragadjanak” valamit.
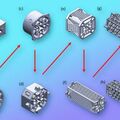
Tapasztalati úton győződtek meg a jelenlegi modellek korlátairól. Ha egy ujj akadályozva van, akkor a többi sem mozdul, és a tárgyak megfogása is akadozik. Erre találtak ki megoldást, egy „hámfát” több kapcsolódásra alkalmas központi ízülettel. Mind az öt ujjra alkalmazták, és az összes képes független mozdulatokat tenni. Így már sokkal pontosabban és hatékonyan markolnak meg tárgyakat.
A műkezet más módszerrel is tökéletesítik. A műanyaghoz hőre színváltással reagáló termokromikus szálat adtak, ami azért fontos, mert a felhasználó így tudja, hogy egy felület meleg vagy sem.
Még nincs teljesen kifejlesztve, de az MIT-s csapat tapintásalapú visszacsatoló-komponensen is dolgozik. Az ujjhegy és az alsókar között futó csöveket, a csövek végén kis zsákokat használnak hozzá. Egyelőre nem tudják, milyen folyadékkal töltsék meg, ami nyomás hatására a nyomtatott ujjhegyről a felhasználó karjára, a bőrre préselődik.
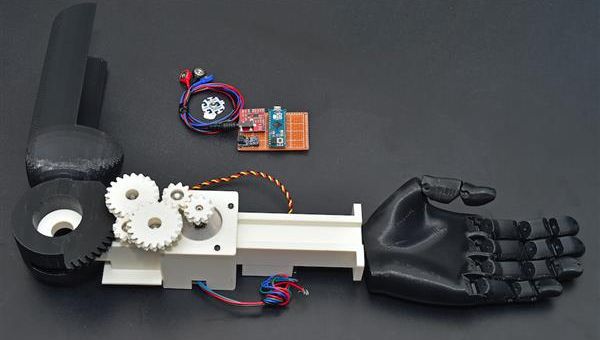
Az e-NABLE kar optimalizálása mellett motorokat tartalmazó robusztusabb terven is dolgoznak. A motorokat a csuklóhoz méretezik, az izomszenzorokat Arduino vezérli. A 350 dolláros kar kompatibilis az e-NABLE termékekkel. A motorizált darab több mint 10 kilót képes felemelni.
A kutatásokat hónapokig folytatják, a végső terveket az e-NABLE mellett a szintén nonprofit Sebesült harcosok projektnek is elküldik.