A Harvard Wyss Intézetének és az MIT Számítástudományi és Mesterséges Intelligencia Laboratóriumának kutatói nyomtatott origami-szerkezeteket használó markolórobotot fejlesztettek. A gép különlegessége, hogy tömegénél százszor nehezebb objektumokat képes felemelni.
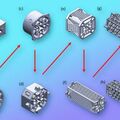
A kart eleve úgy tervezték, hogy leveskanáltól a kalapácsig, drónoktól brokkoliig változatos tárgyakat, esetleg növényeket mozgasson meg. A kúpalakú, üreges és vákuummal működtetett szerkezet fejlesztőit az origami ihlette meg.
Három részből, 16 darabos nyomtatott szilikon-gumi vázból, az eszközt magába foglaló légmentes bőrből és a konnektorból áll.
Tárgyak körül szétterül, a formáját bármihez teljesítmény-veszteség nélkül adaptáló puha markoló pedig rázárul az adott objektumra.
„Az egyszerűség a kar fejlesztésének egyik legfőbb jellegzetessége. Az anyagok és a gyártási módszerek teszik lehetővé a tárgyak és a környezet függvényében egyedire alakítható új markolók gyors prototípuskészítését” – magyarázza Robert Wood (Harvard), az egyik fejlesztő.
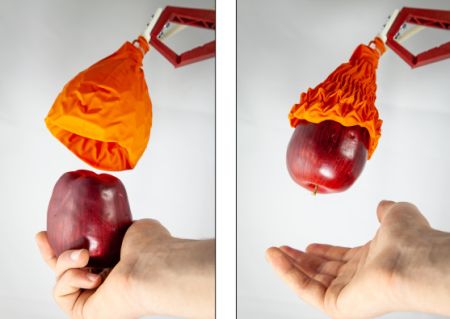
Az átlagrobotra szerelt markolót különböző tárgyakon tesztelték. Átmérőjénél 70 százalékkal nagyobbakat, tömegénél 10-szor súlyosabbakat is felemelt, és nem okozott kárt bennük. Maximum két kilóig poharakkal is elboldogul.
Jelenlegi állapotában hengeralakú tárgyakkal, például üvegekkel és konzervdobozokkal a leghatékonyabb. Szabálytalan formájú, érzékeny darabokat ügyesebben megmozgat, mint a puha ujjakon alapuló tapadókorongos markolók, de még bőven akad rajta finomítanivaló.
Például lapos tárgyakkal (könyvekkel stb.) problémái akadnak, de fejlesztői dolgoznak már a megoldáson. Gépi látórendszerrel is ki akarják egészíteni, hogy „lássa”, mit csinál, és munka közben eldöntse, hol a legjobb megfogni egy-egy tárgyat. Azt is tervezik, hogy a céltárgyat különböző szögekből közelíthesse meg, és a legelőnyösebb lehetőség mellett döntsön.
Ez azt jelenti, hogy a 3D nyomtatás, vákuum és puha robotika előnyeit kihasználó gépet mesterséges intelligenciával vértezik fel. Michael Wehner, a Santa Cruzi Kaliforniai Egyetem kutatója szerint egy ilyen kar pár éven belül lehet annyira ügyes, hogy megfogjon, majd a kórházi ágyon fekvő betegnek adjon egy rózsát.